MAQUET
Servo i、Servo s
Siemens Elema社(スエーデン)の「サーボベンチレーター」は、先進性と高機能が評価されて人工呼吸器の世界標準機の地位を確立していった歴史的ブランドである。今日では標準的な制御法である電子サーボ制御を最初に確立した人工呼吸器でもある。圧とフロー情報に基づいて吸気バルブと呼気バルブを電子的にフィードバックサーボ制御するのは、メカニカル制御が主流であった当時としてはとても画期的であった。「ネズミから象まで」のキャッチフレーズが誇示するように、患者対象は新生児より成人までを守備範囲とする驚異的な性能を有していた。
Servo 900の開発は1960年代に始まり、1971年には出荷が開始された。1976年には、900Bに発展してSIMVが付加された。1980年には900Cが発売され、PSV、PCVという今日では不可欠の圧換気モードが実用化された。1991年には、Servo-300を発売し、PRVC(Pressure Regulated Volume Control)、VS(Volume Support)、SIMV(Press.Contr.)+PSVなどの新世代の圧換気モードに加えて、従来は新生児モードにおいて不可能と言われたトリガー性能(PTV)や、新生児モードでは必須といわれていた定常流に頼らないディマンド性能を確立した。1995年にはServo-300Aが追加されて、Control modeとSupport modeが自動的に切り替わる機能(Automode)を提唱した。1997年には弱点であったグラフィック機能もServo Screen 390(オプション)によって強化した。サーボの歴史は呼吸モードの発展史そのものである。
さしもの伝説的なservo 900シリーズも2003年には販売を終了した。後継機であったServo300(1991年~2003年)の製品寿命は意外にも短く900Cと同時に販売終了した。これは2003年にSiemens Life Suport SystemsがGETINGE ABに買収されたためでもある。ちなみにMAQUETはもともとドイツの会社であるが、スエーデンのGETINGE ABがMAQUETを買収し、Siemens Life Suport Systemsを買収した後に、クリティカルケア部門をMAQUETに統一したので、MAQUETの社名を冠に戴くようになった。2003年以降は生産の合理化がおこなわれ、Servo iのみが販売されている。2005年より廉価機種を投入する目的でServo sが発売された。これは単純に低価格帯の機種を揃えるという営業上の理由から生まれた機種であるが、実は、内部構造はServo iとほぼ同じであり、これらはハードとソフトを共有している。
Servo iでは、それまでは弱点と言われていた呼気側のアナログ方式のフロートランスデューサーがデジタル式の超音波トランジット方式に変更されて、さらに高精度かつ高信頼性になった。Servo iには小児用、成人用、ユニバーサル(小児、成人の両方)の3種類のモデルが用意されている。PCV,PRVC,VS,BiVent,NIVなどはオプション扱いで必要なものを選択購入するようになっている。実のところ本体には最初からフル機能のソフトが搭載されている。オプションを購入して機能制限を解除してもらうと、これらの機能を利用できる仕組みになっている。ソフトウェアVer4.0ではNAVAもオプション設定されている。これは食道内に留置したセンサーで横隔膜の筋電位を捉えることにより、呼吸筋の働きで気道内圧やフローが変化するより、さらに一歩早いタイミングで吸気・呼気を捉えることが可能になった。
2.性能
1)利用できるモード
Servo i Servo s
------------------------------------------------------
Volume Control(VC) VC
Pressure Control(PC)) PC
PRVC
Vomume Support(VS)
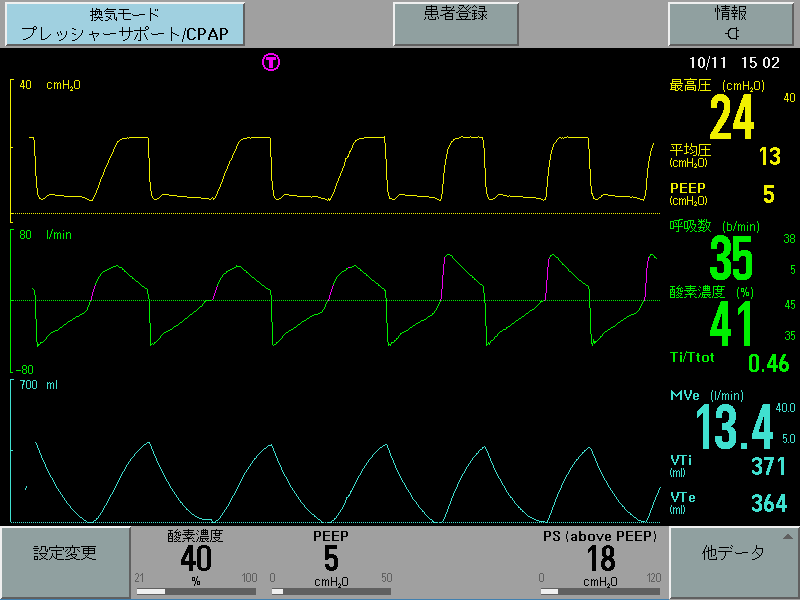
Pressure Support(PS)/CPAP PS/CPAP
SIMV(VC)+PS SIMV(VC)+PS
SIMV(PC)+ PS SIMV(PC)+PS
SIMV(PRVC)+PS
Bi-Vent
NIV Pressure Support
NAVA
------------------------------------------------------
Automode
+PEEP +PEEP
2)基本データー
サンプリング時間0.5 ms
最大吸気ガス流量
強制換気.........198 LPM
PSV..................198 LPM
最大強制換気数..........150 BPM
最大SIMV回数........... 60 BPM
3.制御回路、制御機構
Servo-300では、それぞれにMPUを搭載するお互いに独立した制御ボードをアナログ信号で連携し、MPUによる中央処理システムを避けた特殊なシステムになっていた。これはデジタル器機が持つ特有の危険性に配慮したうえの設計で、MPUの暴走でシステム全体が停止するのを防いでいたが、バージョンアップを困難にする機構であった。さすがにServo iは一般的なマイクロプロセッサーによる中央制御になった。
2)機械的機構の特徴
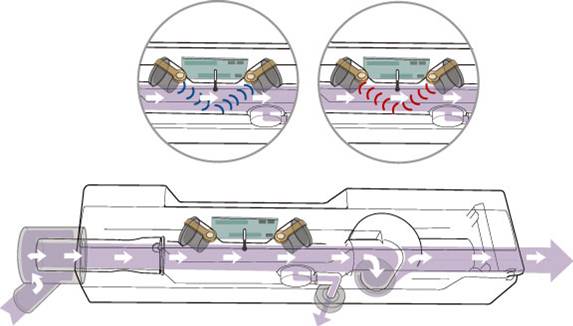
a)吸気ガス、呼気ガスともに口元のフロートランスデューサーを使わずに新生児対応としたのは驚異的な技術である。しかも広範囲の対象に安定したガス制御を行えるのは卓越した技術である。しかもフロートリガーの最高感度は0.05LPMとこれも驚異的である。さらに応答性を改善する目的でYピースでの計測をするYセンサオプションも用意されている。
b)人工呼吸器の呼気系のガス回路は滅菌できて当然であるが、吸気系までも滅菌できるのはシーメンス社だけの伝統である。ゆえにガス回路はとてもシンプルである。しかしその代償として多くのバクテリアフィルターを消耗部品として消費する。
吸気ガスの流量計測は吸気ガスモジュール内に内臓した差圧型のセンサーで計測する。呼気ガスの流量計測は超音波トランジット式である。これは流体の中を伝わる音波の伝搬時間が流体の速度によって変化する性質を利用したもので、2つの超音波発信源間の伝搬時間差が流量になる。モジュール内には圧センサーと呼気弁が内蔵されている。
Servo300と同じ構造である。吸気バルブは、電磁力"electromagnetic motor"によりピストン"piston"を駆動し、膜式バルブ"membrane valve"を押して、ガス通路の開閉を調節する構造になっている。吸気バルブと駆動回路は、フローコントロール・ユニットとしてモジュール化されている。
脱着式の呼気弁ユニットが採用されて、サーボ伝統の呼気弁滅菌中は稼働できない欠点が解消された。脱着は容易にできる。通常は1台の人工呼吸器に2個の呼気弁ユニットが付いてくる。呼気弁と呼気流量計測機能と圧計測機能が一体化されたユニット型の構造に内蔵されている。Drager社のEvitaが初期の頃に採用していたものと類似である。これはDrager社に資本参加しているのと関係があるのであろうか?構造の詳細は公表していない。
これ以上単純化できない程シンプルである。センサーの汚染予防用のパージ流さえ省き、センサー毎のバクテリアフィルターで汚染に対応する。しかしこれらは患者毎に交換を要する部品になる。一般的に人工呼吸器には作動中であっても圧や流量センサーを自動校正していく機構を設けているが、サーボシリーズには単純なガス回路ゆえに患者使用中に作動する自動校正機構を持たない。したがって、患者に接続する前に行われる起動時の校正プロセスは必須であり、省いてはいけない。
5.制御ソフト
各機能の説明
1)トリガー方式
呼気バルブ直前の圧変化による圧トリガー方式もしくはフロートリガー方式を選択できる。新生児であってもYピースにフロートランスデューサーを必要としない。これは呼気側のフロートランスデューサーの精度向上の恩恵である。Ver3.0以降は応答性と確実性をさらに改良する目的でYピース部分での圧とフロー計測するYセンサオプションも可能である。ちなみにバイアスフローは小児モードで0.5LPM、成人モードで2LPMであり、それに対して10%ステップでフロートリガー感度を設定できる。フロートリガー感度表示は絶対値ではなくレベル1~10になっている。レベル10が最も感度が高いが、オートトリガーするのでレベル5あたりで使用することが推奨されている。レベルを上げるとバーグラフの表示が赤くなる。通常は赤く表示される領域を使用しない。リーク補正機能はないので、カフなしチューブを使用する際には感度調節が重要である。
時間サイクルというより量サイクルとしての性格に類似する方式である。通常は吸気ディマンドが強いと吸気時間が短縮する。病的肺の患者に適応することは推奨されない。このモードは"sCMV"に相当するが、自発呼吸への同調性の改善が改良点である。サーボでは、これをVolume Control Ventilation(VCV)と呼んでいる。図の番号に沿って説明する。①吸気努力がなければ設定どおりのTI、TP、TEで呼吸サイクルが構成される(=Time cycle)。 ④吸気トリガーがあればこれに同期して強制換気が送られる。②吸気時間(TI)の間に、強い吸気があり、PEEPレベルより-2cmH2Oまで陰圧になれば、ディマンドガスが供給されて気道内圧をPEEPレベル+2cmH2Oに維持する。吸気ディマンドが設定吸気ガス流量を超えている限り、吸気量、吸気時間とも増量する。もし途中で吸気ディマンド流量が低下してきて設定吸気ガス流量に等しくなった時点で2つの選択が為される。換気量が達成されている場合はさらに吸気ディマンドが継続される。吸気が終了すると吸気ポーズ時間がこれに続く。③もし吸気ディマンド流量が設定吸気ガス流量に等しくなった時点で一回換気量が達成できていない時は、一回換気量が達成されるまで設定された流量を供給する(=Volume cycle)。この際には吸気時間は短縮する。その後に吸気ポーズが続く。⑤吸気途中に上限圧"upper pressure limit"に達すれば吸気は強制終了する。吸気ポーズは入らない。
固定時間方式である。自発換気相ではデマンドフローやPSVが供給される。トリガーウィンドーの長さは、CMVサイクル時間の90%である。(注意:サーボではこれをSIMV Breath cycle timeと呼ぶが、他メーカーでSIMV cycle timeが意味する概念と異なるので注意)強制換気はVolume Controlで入る。
このモードでは、強制換気はPCVで入る。①~⑤の説明はSIMV(Volume Control)と同じである。なお、患者の安全のために吸気圧がPressure Control Level above PEEPを+20cmH2O以上になると吸気が強制終了する。
5)PSV
吸気終了認識条件は、(1)吸気流量がCycle-off level(ピーク値に対する%値)以下になった時、(2)気道内圧が気道内圧上限に達した時、(3)PSVの吸気が開始してからピーク流量の25%になるまでの時間の50%がピーク流量の値が25%以下になってから経過した時、である。(4)いずれの場合でもPSVの最大吸気時間は小児で1.5秒、成人で2.5秒以下に制限される。特に条件(3)(4)はリークなどでPSVが終了しないのを防ぐための対策である。
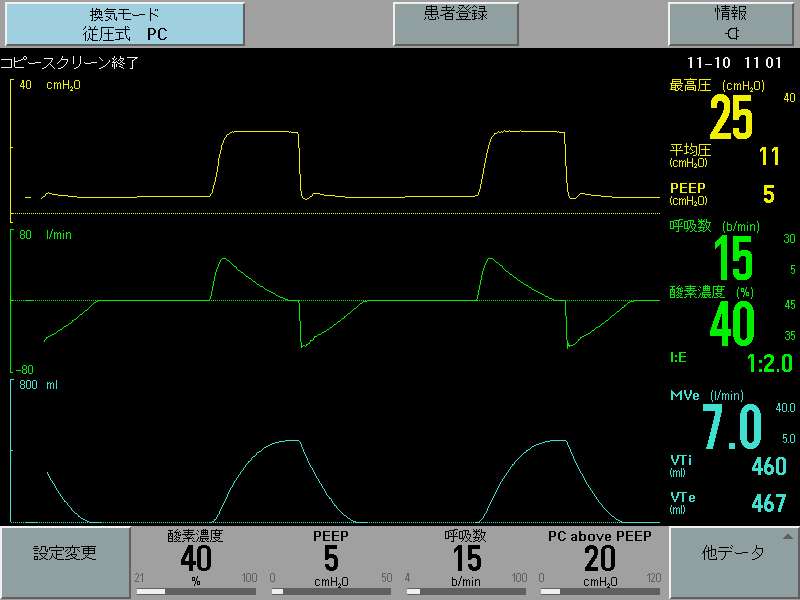
このモードは、PCVに相当する。Patient triggerもしくはTime triggerで吸気が開始され、Time cycleで吸気は終了する。図のように設定された、TI、TP、TEでサイクルが構成される。吸気時間にはPressure Control above PEEPで設定された圧が呼吸回路に加えられる。図について、①吸気流量パターンはふつう暫減波形になる。吸気の終わりには、②吸気流量は、0LPMに近くなることもあるし、③0LPMの場合もある。④もし気道圧上限"upper pressure limit"にかかると即座に吸気は終了する。⑤患者の吸気努力に同期することもできる。 吸気圧がPressure Control Level above PEEPを+20cmH2O以上超えた場合、吸気は強制解放される。
7)PRVC(Pressure Regulated Volume Control)(
図;PRVCの説明)
これはPCVの利点を生かしたまま、従量式の換気と同等の効果を達成する新モードで、PCV圧を自動調整して換気量の恒常化を図っている。ピーク気道内圧を低くできる従量式換気モードの変種である。これはDrager社EvitaのPressure Limitation Ventilationと目的は同じくするが、Evita4ではAutoFlowに発展改良して採用されている。このモードは、PCVよりさらに強制的で、より換気能力の乏しい患者向けである。吸気トリガーがあれば、これに同期して、なければ、一定の間隔で換気が開始される。PCV圧の決定は次の手順で行われる。通常状態では、吸気の終了ごとに次の演算式で新しい吸気圧を演算する。
Pcalc=Pin use*TVp/TVm
Pcalc:計算された圧
Pin use:使用した吸気圧
Pnext:新しく設定される吸気圧
TVp:設定された一回換気量
TVm:実測された吸気量
Pcalc値は9秒の時定数を持つLow Pass Filterに掛けられ、PCV圧制御用の新しい基準圧(Pnext)になる。つまり、一呼吸ごとに、実測コンプライアンスに基づいて、必要とされるPCV圧"Pressure Control Level"が決定される。圧の変化は最大3cmH2Oに制限される。
最終的には、一回換気量が一定値に収束される。具体的には次のプロトコールで制御が行われる。図に沿って説明する。
①最初の換気は10cmH2Oの圧でおこなわれる。このテスト換気で次のPCV圧(Pcalc)が演算されるが、この値はそのままPnextとして用いられる。(フィルター処理なし) ②引き続く3呼吸もフィルター処理なしで決定されるが、次の式のように、圧の変化量の75%値が用いられる。
Pnext=Pin use+0.75*(Pcalc-Pin use)
=0.25*Pin use + 0.75*Pcalc
ここまでがテスト換気手順になる。
③5呼吸目より、フィルター処理が行われ、通常の手順で、必要とする換気圧(Pnext)を再設定する。圧の変化範囲はPEEPレベルより5cmH2O below Upper Pressure Limitまでである。安全を考慮して、気道圧上限"Upper Pressure Limit"は可能な限り低く設定する。④に規定されているように呼吸時間は、設定されたTIとTEに固定されている。この点がVolume Supportとの違いである。⑤は圧が安定して換気量も設定値が維持されているのを示している。⑥では換気量が設定値より実測値の方が多くなり換気圧を減らしている過程を示している。もし患者回路が吸引操作等ではずされた時は、もう一度テスト換気手順①が始まる。
これも基本はPSVであるが、分時換気量を安定化させるために、PRVCと同様の手順で新しいPSVレベル(=Volume Supportレベル)を自動的に設定する。ただし18秒の時定数を持つフィルターが用いられる。 PRVCと異なり、呼吸数は患者に依存しているので実測呼吸数に応じてPcalcの演算式が切換わる。設定呼吸数より実測呼吸が多い場合はPRVCと同じである。少ない場合は次の式になる。
Pcalc=Pin use*MVp/MVm
MVp:分時換気量の設定値
MVm:吸気分時換気量の実測値
①最初のテスト換気は10cmH2Oの圧でおこなわれる。②必要変化量の75%の圧で続く3呼吸を換気する。ここまではフィルター処理をしない。③その後は通常の手順で設定する。圧が変化する範囲はPEEPレベルよりUpper Pressure Limit - 5cmH2Oまでである。一回の変化量は3cmH2O以下である。またPnextは1.5*Pin useを越えない。④では換気量が設定値より実測値の方が多くなっているので、次の換気圧を減らしていく過程を示している。
⑤このモードは基本的にはPSVと同じ方式なので、吸気トリガーがなければ換気が始まらない。患者は自由な吸気時間と呼吸数と呼気時間が許されている。
⑥もし、呼吸数が少なくなり⑦無呼吸アラームにかかれば、⑧自動的にアラームを鳴らしてPRVCに切替わり、患者の分時換気量を確保する。アラームを手動でリセットすると再びVSに戻る。
患者の吸気量が設定一回換気量の175%になれば強制的に吸気相が終了する。患者回路が吸引操作等で はずされた時は、もう一度テスト換気より開始する。
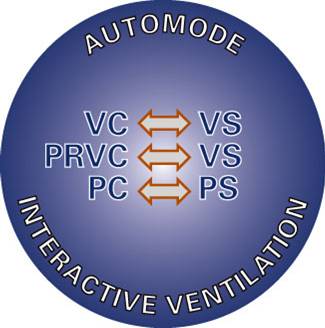
Servo iにはPRVC, Volume Control, Pressure Controlの3つの調節呼吸(強制換気)モードが用意されているが、。これらの3モードを選択した際に、AutomodeスイッチをONにすると2回連続してトリガーすればcontrol modeよりsupport modeに切り替わる。support modeにおいて一定の時間(Adult ; 12 sec., pediatric ; 8sec., neonate ; 5sec.)トリガーがなければ自動的にcontrol modeに替わる。
PRVC/Supportでは、PRVCの最終の換気圧がそのままVolume Supportの換気圧の初期値になる。Volume Control/Supportでは、最終のVolume ControlでのEIP圧がVolume Supportの換気圧の初期値になる。Pressure Control/Supportでは、それぞれの設定圧が換気圧になる。
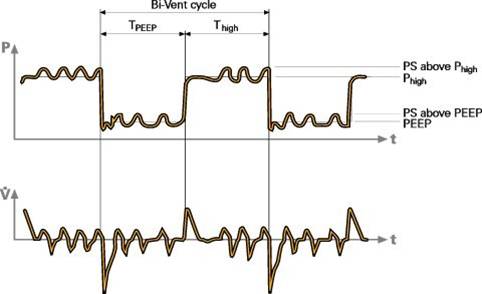
これはDrager社のBIPAPと類似の換気モードで、2つのPEEPレベルを自発呼吸に対して提供するモードである。本書において広義のBIPAPと記載しているモード概念に近い。高圧相と低圧相との移行は可能な限り自発呼吸に同調する。トリガーウィンドーに関しては不明であるが、各相の終末何%かがトリガーウィンドーになっているもようである。Drager社のBIPAPと違い、高圧相と低圧相のそれぞれに任意の圧のPSVを付加することができる。
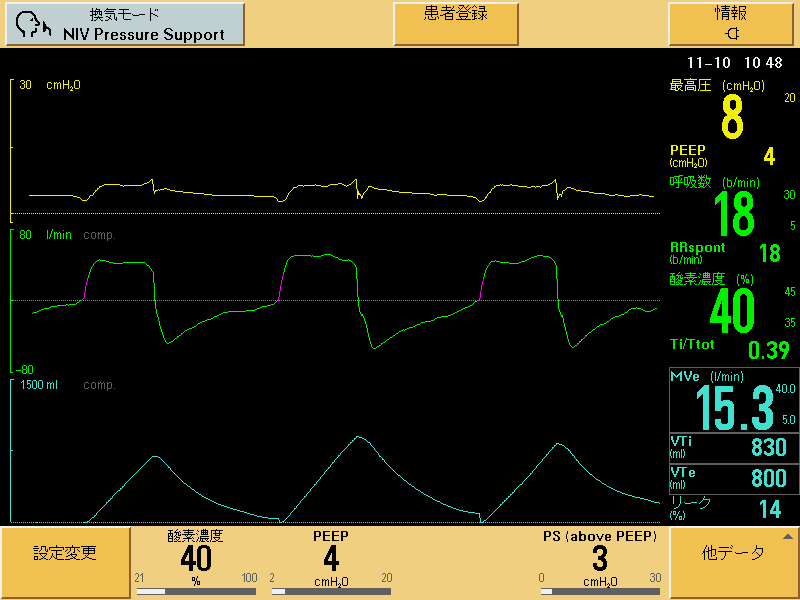
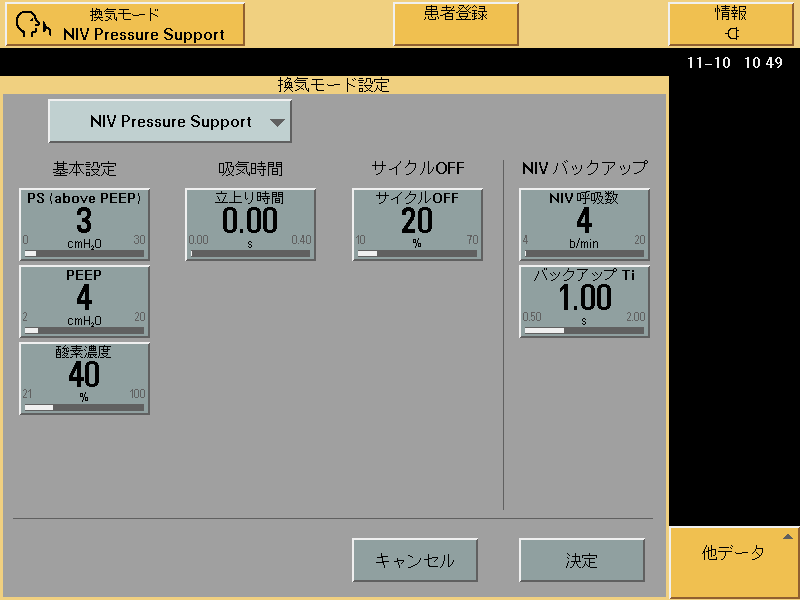
マスク下に行う圧換気モードである。NIVモードになると画面表示は黄色の枠になる。PSVとPCVモードのみを選択できる。リーク補正機能はあるが可及的にリークが少ないように最適なマスクを選択しきちんとセットする。NIVで許容される最大リーク量はAdultモードで50LPM、infantモードで15LPMである。NIVではトリガー感度の設定はない。(1)気道内圧が1㎝H2O低下したとき、(2)100msの間に6mlの変動があるとき、に吸気が開始する。サイクルOFFは(1)気道内圧が設定値より+1cmH2O上がった時、(2)リークフローが設定サイクルOFF値より低下した時、である。
12)Insp.Hold、Exp.Hold
これらのボタンを使って、End Inspiratory Pause pressureやAuto-PEEPの測定ができる。
13)入力/出力
オプションのメモリーカード(Ventilation Record Cardと称する)を挿入すれば画面のコピーや、換気情報を記憶できる。メモリーカードを介してパソコンに情報をコピーできる。さらにRS232C端子のシリアルポートからリアルタイムで信号を出力できる。
14)ネブライザー
超音波式なので駆動ガスを要しない。したがって駆動ガスによる換気量の変化や酸素濃度の変化が起こらない。
15)無呼吸バックアップ機能
AutoModeを利用して無呼吸バックアップを行う方法とBack-up Ventilationを利用する方法がある。Back-up ventilationでは無呼吸でPSV→PCV、VS→VCになる。I:E比や換気回数吸気立ち上がり時間はそのままである。無呼吸時間は成人モードで15-45秒の範囲で、小児モードでは5-15秒の範囲で設定できる。
16)PEEP compensator(PEEP補正)
呼気バルブのサーボ機構により、呼気ガス流量に関わらず正確なPEEP/CPAPが維持される。
17)CO2モニター
オプションでYピース先端のCO2をモニターできる。吸光度測定方式である。
18)バッテリー
12vのNiMHバッテリーを最大6ユニットまで装着できる。1ユニットあたりおよそ30分使用できる。
19)コンプレッサー
専用のコンプレッサーを装備できる。コンプレッサーとしては静かな方であるがタービンの静粛性には及ばない。
20)ライズタイム
1)基本
納入時に2つの操作体系(吸気時間設定方式とI:E比設定方式)から1つを選択できる。メーカーの技術者が解除キーを入力して、提供するモードや操作体系を設定するようになっている。現実としてAdult、Infant、Universalのいづれの機種も全く同じソフトウェアーを持っているので潜在的に同能力である。ライセンス購入に応じて、PRVCやVS、AutoMode、Universalなどの機能が解除されて、そのモデルの性能が決定される。
Servo-iではようやく米国市場や日本市場での強い要望により(米国と日本での販売台数にほとんど差がなく、日本での販売台数が多い時期もある)、一般的な人工呼吸器で用いられている吸気時間設定方式、つまり一回換気量、吸気時間、換気回数から設定していく方式を選択できる。この場合I:E比は1:2として内部処理されSIMVのトリガーウィンドー時間が決定される。
一方、これまでのサーボに採用されていたI:E 比設定方式も選択できる。これはサーボ独特の分時換気量、呼吸数、%吸気時間、%吸気ポーズ時間から設定していく方式で、従来のサーボの操作体系を世襲できる。しかしこの方式を用いる必然性は疑問である。
2)操作
起動時にスタンバイ画面が表示される(
図;始動時の画面)。通常は始業点検メニューを選択して始業点検を行う。緊急時にはスキップしてスタートすることも可能である。タッチパネルを用いて設定する(
図;設定メニューが表示された画面;この図ではNIVモード)。モード、一回換気量、換気回数、アラーム設定などはタッチパネルで選択して、メニューを表示させてノブで数値を選択し、ノブを押して確定する。PEEPや酸素濃度など、頻回にアクセスする項目はパソコンのファンクションキーのように、項目に対応したつまみが液晶画面の下部に用意されているので素早く設定変更ができる(不用意に変更されないように透明カバーで保護されている)。
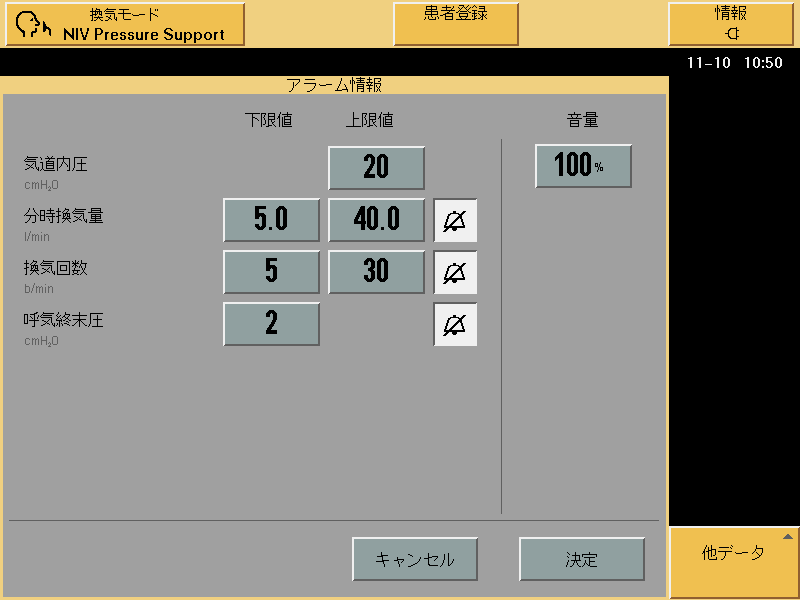
①呼気分時換気量;上限、下限、ならび未設定アラーム。
②気道内圧上限;警報と同時に吸気は強制終了する。
③無呼吸;15秒間トリガーが認識されない時。
④酸素濃度;上限、下限。
⑤その他;電源、ガス供給に異常のある場合。
各種グラフィック表示(フロー、ボリューム、圧、フローボリュームカーブなど)、各種のモニター数値などの表示が可能である。
9.患者回路構成、加湿器
F&Pなどが選択できる。
10.日常のメンテナンス
呼吸回路と呼気系の部品の洗浄、滅菌、乾燥が必要である。呼気ユニットは85℃以上の温水で洗浄した後、アルコールなどで消毒し、その後、精製水でゆすぎ、オートクレー部で滅菌乾燥させる。呼気ユニットを複数台用意しておけば、呼気ユニットを順次交換していくことで機器を連続使用することが可能である。呼気系の滅菌を避けるためにディスポのバクテリアフィルターを呼気弁直前に設置する手もある。
11.定期点検
1)吸気系
年に1度もしくは5,000時間毎に吸気系の部品も洗浄、滅菌する。具体的にはガスモジュール用のフィルター、吸気圧トランスデューサー用のバクテリアフィルター、O2セル用のバクテリアフィルター、ガスモジュール用のノズルユニット、である。
2)酸素センサー
酸素濃度測定用の燃料電池は消耗品なので定期的に交換が必要である。交換後はキャリブレーションが必要である。長期間使用できる超音波型センサーもオプションで用意されている。
3)その他
年に1度もしくは5,000時間毎にバッテリーモジュールの点検、ガス供給圧トランスデューサーを点検する(詳細はマニュアルを参照)。
4)呼気カセットメンブラン
呼気弁のメンブランは目安として1,000万回の作動(ビート)が可能である。個々のカセットに対して使用状況を表示する機能が用意されている(アクセス方法の詳細はマニュアルを参照)。
12.欠点
1)I:E 比設定方式と呼ばれるサーボ独特の操作体系をも継承しているが、この点は一見サーボユーザーに親切に見えるが、元来こうした操作体系は欠点であったので現実的には無意味である。
2)すべての生産モデルはハードウェアー、ソフトウェアーともに同等であるのに、ユーザーが支払った金額でソフトウェアー的に機能が制限されるのは不愉快である。なんとベーシックモデルにはSIMVとPSV、VCしか搭載されていない。PRVCやVC、AutoMode、Bi-Ventは言うに及ばず、PCVですらオプション扱いである。決して安くないServo iにPCVすら標準搭載がないのは理解に苦しむ。何も熟慮せず(人任せにして)購入したServo iが、値切りに値切って安く買ったServo sと性能が同じだったという笑うに笑えない事態がおこっている。車に例えれば、高価なベンツにパワーウィンドウやリアワイパー、エアコンがついていないようなものである。一般的な日本人ユーザーの心情として製造コストに見合った価格には納得いくが、ソフト的な事柄すべてに高額な価格設定をしていることに不快感を感じる。この路線で行くなら、機能が高まればそれに見合って価格が高騰することになる。パソコンや家庭電化製品の感覚で言えば、改良や技術の進歩は当然であり、それに対して高額のオプション費用を要求するのは進歩を無視した役人的発想である。こうした価格設定が容認されるなら現在のパソコンは1台100億を超える価格設定になるはず。ちなみにライバルの米国製のVELAは標準で各種モードてんこ盛りで廉価機の価格帯になっているので、ソフト自体にコストがそれ程かかっているとは思えない。ニューポート社のe360はほぼ半額でソフトウェアー満載である。日本国内においては、さすがのサーボも営業上、実際の販売現場ではレス仕様で見積もりを出し、納入時にオプション機能をサービスしている模様である。しかしこうした販売形態は異常である。
3)肺メカニクスを表示するのにも、高額なオプションが必要なのは理解できない。
4)特殊な状況ではあるが、PRVCやBi-Ventモードでも吸気相途中に急激な呼気があると気道内圧がアラームレベルまで上昇してしまう。つまり呼気弁での圧リリーフが遅い。カタログ上だけで言えば、吸気側の圧制御系の応答性はEvitaに比べると圧倒的に良いが、極端な状況下では、グラフィック画面上オーバーシュートによる圧スパイクや圧リリーフが遅いための圧スパイクなどの現象が観察しうる。この原因は呼気弁の圧制御ソフトの問題であろう。Bi-Ventであっても機械内部では吸気相と呼気相の区別があり吸気相では呼気弁を安全圧で閉じているため、急激な呼気の開始があると、呼気弁の解放が遅れて急激な圧スパイクを生じる。ちなみにEvitaではCPAP圧が経時的に変化する形で吸気弁と呼気弁が制御されているので、設定圧以上のガスは呼気弁よりリリーフされる。そのため圧波形にスパイクはほとんど認めずあったとしても1cmH2O程度である。そのかわり、リリーフ時には呼気弁よりギューっと不快音を生じることもある。
5)吸気ガスが流れる音、呼気ガスが排出される音は、昔のサーボも最新のサーボも構造が違うのに同じ音がするのは、自動車の排気音がメーカー毎に独特の音があるのに似ていて興味深い。ただし、個人的な好みで言えば、サーボの音はシュノーケルなど細い管を通じて呼吸をしているような息苦しさを感じさせる音なので印象は良くない。
6)おそらくハードウェアの性能は世界最高であろう。しかしながら、制御ソフトがこれを生かし切れていない。ハードウェアー性能の劣るEvita に対して、総合的な評価において決して勝っているとは言えない。操作体系の熟成度や、呼気弁の制御ソフトを含めた圧制御技術、ガス流量制御技術、においてノウハウに歴然とした差がある。新生児モードでもトリガーにリーク補正機能がないので、せっかくの世界最高クラスのトリガー感度を生かしていない。
7)始動開始時にテストシーケンスを要求されるのは面倒である。これはできるだけニューマティック回路を単純にするという設計思想による仕様の問題ではある。しかし、どれだけユーザーの理解を得られるか疑問である。
8)必要なオプションを装備するととても割高になる。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}