PSV(Pressure Support Ventilation)
丂 PSV偼Siemens Servo 900C偵弶傔偰搵嵹偝傟偨丅僨傿儅儞僪僼儘乕曽幃偵屌幏偟偨Siemens Elema幮奐敪恮偺嬯擸偺惉壥偱偁傞丅僨傿儅儞僪僼儘乕曽幃偼丄掕忢棳曽幃偵斾傋偰屇媧夞楬偺婥棳掞峈偲丄僩儕僈乕偟偰偐傜幚嵺偵僈僗偑嫙媼偝傟傞傑偱偺帪娫抶傟偑媧婥巇帠検傪憹戝偡傞丅PSV偼丄偙傟傪夝寛偡傞偨傔偵乽媧婥傪堦掕偺埑偱壛埑偟偰夞楬掞峈傪憡嶦偟丄偝傜偵彮偟崅偄埑傪壛偊偰媧婥巇帠検傪寉尭偡傞乿曗彆姺婥朄偲偟偰峫埬偝傟偨丅尰嵼偱偼丄PSV偼帺敪屇媧傪曗彆偡傞姺婥朄偲偟偰丄偁傞偄偼恖岺屇媧婍偐傜偺僂傿乕僯儞僌姺婥朄偲偟偰崅偔昡壙偝傟偰偄傞丅
丂PSV偺摿挜偼丄媧婥帪娫丄媧婥棳検丄屇婥帪娫丄堦夞姺婥検丄屇媧夞悢側偳偡傋偰偑丄姵幰偺帺桼堄巙偱寛掕偝傟傞偙偲偱偁傝丄僆儁儗乕僞乕偑愝掕偱偒傞偺偼PSV埑偲僩儕僈乕儗儀儖偺傒偱偁傞丅
丂
乮嶲峫侾乯屆偔偰怴偟偄PSV
丂PSV偼丄1960擭戙弶婜偵偡偱偵懚嵼偟偨丅摉帪丄墳摎偺椙偄僩儕僈乕婡峔偲怣棅偱偒傞婡夿偵傛偭偰丄僯儏乕儅僥傿僢僋夞楬(Pneumatic circuit)曽幃偑昡壙傪摼偰偄偨丅偙偺夞楬偼丄僈僗偺埑椡偩偗傪巊偭偰曎傗僗僀僢僠傪愗傝懼偊傞乽偐傜偔傝乿偱偁傞丅媧婥憡偼婥摴撪埑偑愝掕抣偵忋徃偡傞偲廔椆偡傞Pressure limit曽幃乮廬埑幃乯乮尰嵼偱偼Pressure cycle偵暘椶偝傟傞乯偱偁偭偨丅戙昞揑側儊乕僇乕偲偟偰Bird幮傗Benette幮偑偁傞丅
丂Benette幮偺PR-2偼Bird僔儕乕僘偲摨偠廬埑幃恖岺屇媧婍偲暘椶偝傟偰偄傞偑丄椉幰偺嶌摦尨棟偼堎傞丅PR-2偱偼媧婥埑偺棫偪忋偑傝偑斾妑揑憗偔丄婥摴撪埑偼媧婥憡弶婜偵愝掕埑偵払偡傞(傕偟丄偙偙偱媧婥偑廔椆偡傟偽扨側傞pressure cycle偱偁傞)丅偦偙偱丄偙偺埑偼偟偽傜偔堐帩偝傟丄媧婥棳懍偼尭悐偡傞丅媧婥棳懍偑愝掕棳懍(terminal flow)埲壓偵側傟偽媧婥偼廔椆偡傞乮偙偺愝掕僲僽偼杮懱塃墶偵晅偄偰偄傞乯丅傑偨丄晄昁梫偵媧婥偑懕偐側偄傛偆偵媧婥帪娫傪惂尷偡傞time cycle婡峔傕撪憼偟偰偄傞丅偙傟偼丄尰嵼偺PSV偲慡偔摨偠嶌摦尨棟偱偁傞丅
丂
乮嶲峫俀乯PSV偺椶帡儌乕僪
Drager 幮偱偼ASB丄Engstrom幮偱偼Inspiration Assistence偲屇傫偱偄傞偑丄偙傟傜偼傎偲傫偳摨偠嶌摦尨棟偱偁傞丅
丂
俀丏峔惉梫慺
丂PSV偼師偺俁偮梫慺偱峔惉偝傟傞丅(1)媧婥偺擣幆丗姵幰偺媧婥搘椡偵傛傞婥摴撪埑掅壓傪僩儕僈乕(Patient initiated)偟偰憲婥偑巒傑傞丅(2)媧婥憡丗婥摴傪愝掕偟偨埑(PS埑)偵壛埑偡傞(Pressure controlled or Pressure regulated)丅(3)媧婥偺廔椆偺擣幆丗媧婥棳懍偺掅壓傪擣幆偟偰丄婥摴壛埑傪拞巭偟屇婥曎傪奐偗傞丅偙偺媧婥偺廔椆傪擣幆偡傞婡峔偺懚嵼偑廬棃偺姺婥儌乕僪偲嵟傕堎側傞揰偱偁傞丅
俁丏惂屼曽幃
1)惂屼婡峔
丂PSV偺媧婥惂屼婡峔偵偼丄擇偮偺曽幃偑梡偄傜傟偰偄傞丅
a)揹巕惂屼曽幃
丂揹巕惂屼偵傛傞斾椺惂屼曎乮僒乕儃僶儖僽乯傪梡偄偨婡峔偑堦斒揑偱偁傞丅Servo900C丄Bird 8400丄Benette 7200丄Bear-5丄摍偵巊傢傟偰偄傞丅
b)儊僇僯僇儖曽幃
乮
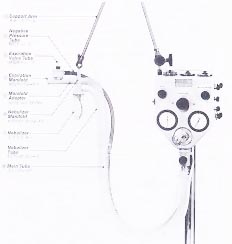
恾丟僨傿儅儞僪僶儖僽丗婥摴撪埑偑姵幰偺僨傿儅儞僪偱PEEP/CPAP埑傛傝掅壓偡傞偲僺僗僩儞偑忋曽傊墴偝傟儃乕儖曎傪奐偔丅婥摴撪埑偑婎弨埑偵側傞傑偱乮姵幰偺僨傿儅儞僪偑枮偨偝傟傞傑偱乯僈僗偑弌椡偝傟傞乯
丂懠偺堦偮偼丄媧婥埑惂屼傪儊僇僯僇儖偵峴側偆婡峔偱丄僨傿儅儞僪僶儖僽(Demand valve)傪梡偄傞偺偑丄捠椺偱偁傞乮CPU-1丄Bear-3丄CV-4000乯丅堦斒揑偵儊僇僯僇儖曽幃偼嵟戝棳検偑彮側偄(嵟崅偱傕120LPM)丅斀墳傕抶偄丅傑偨丄嵶偐側巜昗偼惂屼偱偒側偄丅
2)PSV偺嶌摦尨棟乮媧婥惂屼乯
a)媧婥奐巒擣幆曽朄
丂(1)僼儘乕僩儕僈乕(2)埑僩儕僈乕(3)儅儖僠僙儞僒乕偵傛傞僩儕僈乕偺嶰曽幃偑偁傞丅徻嵶偼乮
1c 僩儕僈乕婡峔乯偺崁傪嶲徠丅姵幰偺媧婥偑擣幆偝傟偨応崌偩偗PSV偑奐巒偡傞丅
b)媧婥偺棫偪忋偘惂屼
丂戝懡悢偺婡婍偱偼丄媧婥偺棫偪忋偘懍搙偼僴乕僪偺擻椡偵埶懚偟偰偄偰丄捠忢丄嵟戝嫙媼壜擻媧婥僈僗棳検偱棫偪忋偘偑峴傢傟傞丅丂偙傟偑掅偄婡婍偱偼丄PSV埑傑偱棫偪忋偑傞傑偱偵帪娫偑偐偐傝丄Pressure cycle姺婥偲椶帡偺僷僞乕儞偵側傞丅
丂堦曽丄嵟戝嫙媼壜擻媧婥僈僗棳検偑崅偄婡婍偱偼PSV埑偑10cm傪挻偊傞偲丄媫寖偵埑椡偑婥摴偵壛傢傞偨傔丄怱棟揑偵嫮偄埑敆姶傪傕偨傜偡丅拞偵偼丄棫偪忋偘懍搙傪愊嬌揑偵挷惍偟偰偄傞婡婍傕偁傞丅尰帪揰偱偼丄埑惂屼宆偲棳検惂屼宆偺擇曽幃偑敾偭偰偄傞丅
丂偟偐偟丄PSV偱偺棫偪忋偘棳検偵娭偟偰偼廩暘側尋媶偑偝傟偰偄側偄丅
(1)婡峔埶懚宆
丂棫偪忋偘懍搙偼丄媧婥僈僗敪惗婡峔偺惈擻偵埶懚偡傞傕偺丅偮傑傝壜擻側嵟戝棳検偱棫偪忋偘傞丅(椺丟ART-2000丄CV-4000丄BEAR-5丄Bird 8400摍)
(2)埑惂屼宆
丂Evita偼丄埑巜昗宆偱PSV埑偺棫偪忋偘懍搙偑壜曄偱偁傞丅偮傑傝丄宱帪揑偵栚昗埑偑忋徃偟偰偄偔偑丄偙偺埑傪婎弨偵偟偨僒乕儃惂屼偑摥偔丅
(3)棳検惂屼宆
丂Adult-Star偼棳検巜昗宆偱丄棫偪忋偘憡偱偼丄堦掕偺僈僗棳検偵側傞傛偆偵僒乕儃惂屼偡傞丅PSV埑偺愝掕偵墳偠偰丄媧婥僈僗棳検偑曄壔偡傞丅PSV埑傪崅偔愝掕偡傞傎偳棫偪忋偘棳検傕憗偔側傞丅
丂
c)媧婥拞偺惂屼
丂愝掕埑(PSV埑)払惉屻偼偙傟傪堐帩偡傞傛偆偵僒乕儃僶儖僽乮僨傿儅儞僪僶儖僽乯偑挷惍偝傟傞丅(=埑偵傛傞僒乕儃惂屼)
丂屇婥曎偼埨慡埑(=100cm H俀O掱搙)偱暵偠傜傟偰偄傞丅
d)媧婥偺廔椆傪擣幆偡傞曽朄
丂PSV偺媧婥憡傪廔椆偝偣傞忦審偼媧婥廔椆擣幆忦審偲屇偽傟傞偑丄奺庬偺曽幃偑偁傞丅
(1)媧婥棳検偺憡懳抣(掅壓棪)
丂偙偺曽幃偑嵟傕懡偔梡偄傜傟偰偄傞丅媧婥棳懍偑寁應偝傟偨嵟戝棳懍(PSV peak flow rate)偺20乣30%偵掅壓偡傟偽丄廔枛棳検(terminal flow rate)偲尒側偟媧婥傪廔椆偝偣傞丅偙偺曽幃偼Bear-3丄Bear-5丄Bird 6400,8400丄Servo-300,900摍偵嵦梡偝傟偰偄傞丅側偍丄Bear-5偱偼PSV埑偺愝掕偵傛偭偰%抣偑曄傢傞丅Servo-300偱偼5%抣偑巊傢傟偰偄傞偑丄Servo-900偱偼75%抣偑巊傢傟偰偄傞丅
(2)媧婥棳検掅壓偺愨懳抣
丂媧婥棳懍偑堦掕偺愨懳抣埲壓偵側傟偽媧婥傪廔椆偝偣傞丅偙傟偼Benette 7200ae傗Engstrom Elvira,Erica丄Ohmeda CPU-1丄IMI CV-4000丄Adult-Star偑嵦梡偟偰偄傞丅Benette偱偼10LPM丄CV-4000偱偼20LPM丄Adult-Star偱偼4LPM偱丄Engstrom偱偼乽媧婥僩儕僈乕儗儀儖乿傑偱掅壓偡傞偲媧婥偑廔椆偡傞丅
(3)偦偺懠
丂New-Port E-200偱偼丄嵟戝棳懍偺栺0.5忔偺抣傪廔枛棳検偲偟偰偄傞丅偙偺抣偑嵦梡偝傟偨崻嫆偼岞昞偝傟偰偄側偄丅Drager幮偺曽幃偼儐僯乕僋偱丄PSV傪棫偪忋偘婜偲埑堐帩婜偵暘偗偰忦審傪曄偊偰偄傞丅棫偪忋偘婜偵偼媧婥棳懍偑掆巭偟偨帪揰傪丄埑堐帩婜偱偼僺乕僋僼儘乕偵懳偡傞25%抣偱媧婥傪廔椆偝偣傞丅
e)媧婥廔椆擣幆忦審乮暪梡忦審乯
丂媧婥棳検掅壓偺専弌偵壛偊偰丄偟偽偟偽埲壓偺忦審偑暪梡偝傟傞丅
(1)嵟戝媧婥帪娫偺惂尷
丂E-200傗Benette 7200ae丄Hamilton Amadeus,Veola偱偼嵟戝3昩偵丄Adult-Star偱偼3.5昩偵丄CPU-1偱偼1昩偵丄Evita偱偼4昩偵丄Servo-300傗Servo-900偱偼IPPV僒僀僋儖帪娫偺80%偵惂尷偝傟傞丅
(2)婥摴撪埑偺惂尷
丂偝傜偵婥摴撪埑偺忋徃傪媧婥廔椆忦審偺堦偮偲偟偰捛壛偟偨婡庬偑偁傞丅Adult-Star傗Servo-900偱偼PSV埑+3cmH俀O偱丄Benette 7200ae偱偼PSV埑+1.5cmH俀O偱丄E-200偱偼PSV埑+2cmH俀O偱丄Servo-300偼preset Pressure Control Level above PEEP +20cmH俀O偱PSV偑嫮惂廔椆偡傞丅
(3)媧婥検偺惂尷
丂New Port E-200傗VIP Bird偱偼嵟戝媧婥検偑惂尷偝傟偰偄傞丅慜幰偼4噂偱丄屻幰偼1.5噂偱丄PSV偑嫮惂廔椆偡傞丅
係.廋忺梫慺
1)嫙媼壜擻側嵟戝棳懍
丂PSV偱偼丄嫙媼壜擻側嵟戝棳検傕廳梫側梫慺偱偁傞丅挊偟偔姺婥擻偺掅壓偟偨姵幰偱傕嵟戝媧婥棳懍偼80l/min慜屻偑娤嶡偝傟丄寬忢幰偱偼200l/min偵傕払偡傞丅偟偨偑偭偰丄嫙媼嵟戝棳懍偺戝偒偄偙偲偼PSV惉岟偺昁恵忦審偱偁傞丅嵟怴偺恖岺屇媧婍偱偼120l/min埲忋偑壜擻偱偁傝丄VEOLA丄AMADEUS丄Benette 7200偱偼180 l/min偱偁傞丅
丂偟偐偟丄堦晹偺崙嶻婡偼60乣70 l/min掱搙偟偐嫙媼偱偒側偄偺偱丄嫙媼僈僗偺晄懌傪掕忢棳傪棳偟偰曗偆曽幃偑庢傜傟偰偄傞丅偟偐偟丄掕忢棳偼僩儕僈乕偡傞傑偱偺帪娫傪慗墑偝偣傞偺偱丄偙傟偑PSV杮棃偺棙揰傪懝側偆丅偟偐傕PSV偼媧婥弶婜偱偺棳検偑挊偟偔崅偔丄傑偨偙偺帪婜偺媧婥検偑慡姺婥検偺拞偵愯傔傞妱崌偑懡偄偺偱丄摨偠姺婥検傪摼傞偵偼丄傛傝崅偄PSV埑偑昁梫偲側傞丅PSV埑偼崅偄掱丄媧婥偺廔椆偵姵幰偺堄巙傪斀塮偟偵偔偔側傝丄埑僒僀僋儖姺婥偺傛偆側嫮惂揑側惈奿傪嫮傔傞丅杮棃丄掕忢棳偲PSV偼丄懌傪堷偭挘傝偁偆堎幙側姺婥朄側偨傔暪梡偡傋偒偱側偄(僼儘乕僩儕僈乕偼暿)丅
2)斀墳帪娫
丂帺敪屇媧偺奐巒偐傜僩儕僈乕偡傞傑偱偺抶傟偼(1)偲摨偠棟孅偱丄傛傝崅偄PSV埑傪梫媮偡傞偺偱PSV偺惈奿傪曄偊偰偟傑偆丅
俆丏PSV偺棙揰偲寚揰
丂PSV偺傛偆側廬埑幃恖岺屇媧朄偼姵幰偺堄巙傪斀塮偟傗偡偄棙揰偑偁傞偑丄寚揰偲偟偰丄帺敪屇媧偑旝庛偵側偭偨応崌傗丄婥摴掞峈偑憹壛偟偨応崌偵偼乽姺婥検偺晄懌乿偵娮傞偙偲偑嫇偘傜傟傞丅傑偨丄PSV摿桳偺寚揰偲偟偰丄帺敪屇媧偑側偔側傟偽偦偺傑傑曻抲偝傟偰偟傑偆丅
丂偟偨偑偭偰丄PSV偵偼堛椕帠屘傪梊杊偡傞偨傔偵丄(a)屇婥偺暘帪姺婥検儌僯僞乕丄(b)柍屇媧僶僢僋傾僢僾(Apnea Back-up)婡擻偑晄壜寚偱偁傞丅偝傜偵丄嵟嬤偺恖岺屇媧婍偵偼(c)姺婥検傪曗彏偡傞僶僢僋傾僢僾婡峔偑暪梡偝傟偰偄傞丅
俇丏奺庬偺姺婥検曗彏婡峔
1)PSV偵暪梡偡傞姺婥検曗彏婡峔
a)PSV+柍屇媧僶僢僋傾僢僾(Apnea back-up)
丂帺敪屇媧偑掆巭偟偨嵺偵丄嫮惂姺婥(Volume ventilation)傪梌偊傞婡峔偱偁傞丅廫暘側姺婥検傪曗彏偡傞栿偱偼側偄偑丄彮側偔偲傕帺敪屇媧偑掆巭偟偨応崌偺懳嶔偲偟偰偼桳岠偱偁傞丅偨偩偟晄姰慡偵帺敪屇媧偑偁傟偽丄暘帪姺婥検偑掅壓偟偰偄偰傕曻抲偝傟偰偟傑偆寚揰偑偁傞丅
b)PSV+SIMV
丂嵟傕妋幚偵姺婥検傪曗彏偡傞尰幚揑側曽朄偱偁傞丅杮朄偺寚揰偼丄SIMV偺夞悢傪憹傗偡偲丄棟榑揑偵偼媧婥巇帠検偼尭彮偡傞偼偢偱偁傞偑丄尰幚偲偟偰嫮惂姺婥偺擖傝曽偵婯懃惈偑側偄偺偱丄姵幰偼嫮惂姺婥偺儕僘儉偵帺敪屇媧偺儕僘儉傪崌傢偣傜傟側偄丅偦偺偨傔屇媧巇帠検偺寉尭偵尷奅偑偁傞丅摨帪偵丄姵幰偼屇媧崲擄傪姶偠丄怱棟揑僗僩儗僗偵傕側傞丅
丂Siemens Servo 900B偵嵦梡偝傟偨SIMV曽幃偼丄SIMV夞悢偑姵幰偺屇媧悢偵墳偠偰曄摦偡傞寚揰偼偁偭偨偑丄姵幰偼師偺嫮惂姺婥傪梊應壜擻偱丄儕僘儉傪崌傢偣傜傟偨丅偙偺曽幃偼丄巆擮側偑傜嵟嬤偺恖岺屇媧婍偵偼巊傢傟偰偄側偄丅
c)PSV+EMMV
丂帺敪屇媧偵偼PSV偱懳墳偟丄姺婥検偺晄懌暘傪EMMV偵傛傞嫮惂姺婥偱曗偆曽幃偱偁傞丅偟偐偟丄EMMV偼乽敱乿偲偟偰嫮惂姺婥偑峊偊偰偄傞姺婥朄側偺偱丄姵幰偼嫮惂姺婥傪彮偟偱傕摝傟傛偆偲乮姺婥擻椡偑晄廫暘偱偁傟偽乯昿夞偺愺偄PSV傪偡傞丅偙偺忬懺偼姺婥岠棪偐傜尒偰傕朷傑偟偔側偔丄傑偨丄PSV+SIMV偵傒傜傟傞埨掕偟偨屇媧忬懺傕摼傜傟側偄丅堦斒揑側PSV+EMMV偼PSV+SIMV傪挻偊傞傕偺偱偼側偔丄PSV偵懳偡傞崅師尦偺僶僢僋傾僢僾婡峔偲峫偊傞偺偑尰幚揑偱傞丅偟偐偟側偑傜丄Drager 幮偺EMMV乮Evita偱偼MMV偲昞婰偝傟偰偄傞乯偼柍屇媧傊偺懳墳傗暘帪姺婥検偺廃婜揑側曄摦偲偄偭偨EMMV屌桳偺摿惈偵懳偟偰揔愗側僼傿儖僞儕儞僌張棟偑偍偙側傢傟偰偄傞偺偱丄屻弎偺AMV埲忋偵桳梡惈偑崅偄丅
d)PSV+AMV(Augumented Mandatory Ventilation)
丂Bear-5偵搵嵹偝傟偰偄傞丅PSV+SIMV偵EMMV偵傛傞僶僢僋傾僢僾婡擻偑偮偄偨姺婥朄偱偁傞丅偙偺姺婥朄偺棙揰偼丄SIMV夞悢偺嵟揔抣偑峀偄偺偱丄姵幰偺忬懺偵曄壔偑偁偭偰傕廮擃偵捛廬偟偰偔傟傞揰偵偁傞丅偟偨偑偭偰愝掕曄峏傪昿夞偵偡傞昁梫惈偑側偄丅
e)VAPS(Volume Assisted Pressure Support)
丂PSV偵CMV傪廳偹傞帠偱椉幰偺棙揰傪怢偽偟寚揰傪尭傜偡丅Bear-1000丄Bird8400STi丄Benette7200ae摍偱棙梡壜擻偱偁傞丅
徻嵶偼IIB.VAPS偺崁傪嶲徠丅
丂
2)PSV埑傪惂屼偡傞姺婥検曗彏婡峔
a)MMV(Minimum Minute Ventilation)
丂Mandatory Minute Ventilation偺棯岅偲嬫暿偡傞偨傔偵埲崀偼Hamilton-MMV偲屇傇丅Hamilton幮偑採彞偟偨姺婥朄偱偁傝丄埨掕偟偨暘帪姺婥検偑摼傜傟傞傛偆偵PSV埑傪帺摦揑偵挷惍偡傞姺婥朄偱偁傞丅PSV埑偼愝掕抣埲壓偵偼側傜側偄丅MMV偼Step by Step Procedure偲柤晅偗傜傟偨僶僢僋傾僢僾婡峔偲堦懱偱婡擻偟偰丄柍屇媧偩偗偱側偔掅暘帪姺婥検偱傕SIMV偵傛傞僶僢僋傾僢僾偵愗懼傢傞丅
b)VS+PRVC
丂Servo-300偵搵嵹偝傟偨怴偟偄姺婥儌乕僪偱偁傞丅VS(Volume Support)偼PSV偺曄朄偱偁傝丄Hamilton-MMV偲摨條偺奣擮偱PSV埑傪帺摦揑偵挷愡偡傞偙偲偱姺婥検偺埨掕壔傪払惉偡傞丅嵟掅PSV埑偼愝掕偱偒側偄丅VS偺柍屇媧僶僢僋傾僢僾偲偟偰PRVC(Pressure Regulated Volume Control)偑梡堄偝傟偰偄傞丅乮
徻嵶偼II-14.VS+PRVC偺復傪嶲徠乯
{kind=link}